員體系")
")























作品詳情
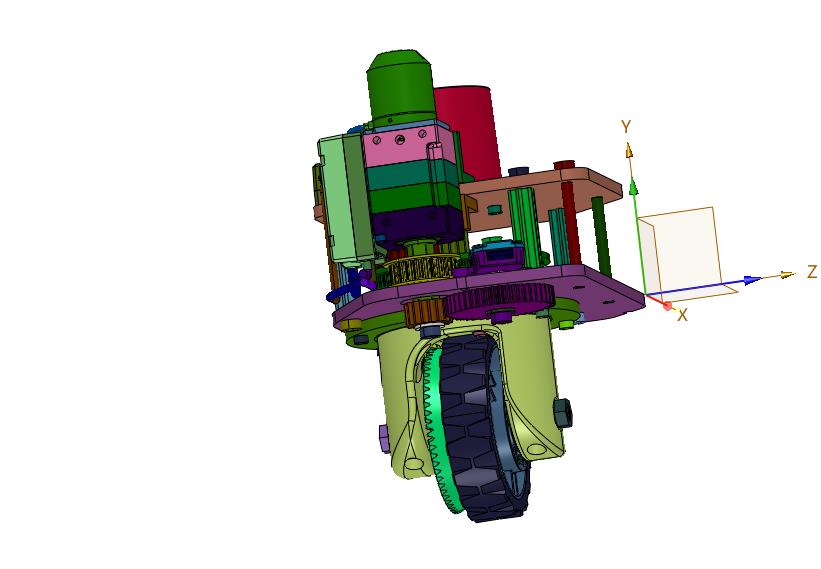
模塊化矢量運(yùn)動(dòng)算法舵輪是一種基于模塊化設(shè)計(jì)和矢量運(yùn)動(dòng)控制理論的先進(jìn)輪式運(yùn)動(dòng)控制單元。它通過(guò)集成多個(gè)功能模塊,實(shí)現(xiàn)舵輪運(yùn)動(dòng)的高精度控制。該算法利用矢量分析,對(duì)舵輪的運(yùn)動(dòng)軌跡進(jìn)行精確計(jì)算,并通過(guò)模塊間的協(xié)同工作,實(shí)現(xiàn)舵輪轉(zhuǎn)向、速度等運(yùn)動(dòng)的靈活控制。這種舵輪在運(yùn)動(dòng)過(guò)程中具有高度的穩(wěn)定性和可靠性,廣泛應(yīng)用于各類(lèi)輪式移動(dòng)機(jī)器人和自動(dòng)化設(shè)備的運(yùn)動(dòng)控制中。
模塊化矢量運(yùn)動(dòng)算法舵輪
-

無(wú)敵真皮皮
上傳于 2025-04-21
本模型來(lái)自于用戶自傳,版權(quán)屬于上傳用戶,如有異議,請(qǐng)舉報(bào)刪除!
-
- 喜歡 0
- 評(píng)論 0
- 瀏覽 0
- 下載 0
-
標(biāo)簽
-
該作者的其他作品
-
-
作品分享


平diy桌面級(jí)快速成型3D打印機(jī)")
地賽道成人兒童電動(dòng)卡丁車(chē)四輪沙灘車(chē)")
電機(jī)4軸高精度自動(dòng)化機(jī)械臂")


動(dòng)臺(tái)袋子印畫(huà)設(shè)備")
")


")
用機(jī)床")

全面罩")
擠出頭加熱鋁塊黃銅打印頭噴嘴")


