
























作品詳情
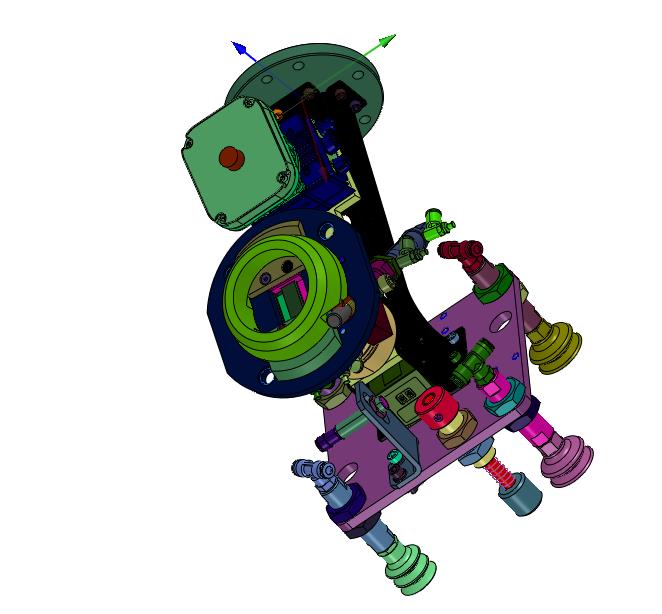
機器人視覺抓料和隔板兩頭抓手是工業(yè)自動化領(lǐng)域中的關(guān)鍵技術(shù)。視覺抓料通過機器人搭載的高精度相機獲取物料圖像,經(jīng)圖像處理技術(shù)識別物料位置、形狀和顏色等信息,然后精準抓取。隔板兩頭抓手則是指機器人利用雙側(cè)執(zhí)行器,適應(yīng)隔板上不同位置和形狀的物料,實現(xiàn)快速、穩(wěn)定地抓取操作。這兩項技術(shù)結(jié)合,提高了工業(yè)生產(chǎn)線上的物料處理效率和精度。



平diy桌面級快速成型3D打印機")




動臺袋子印畫設(shè)備")










