員體系")
")























作品詳情
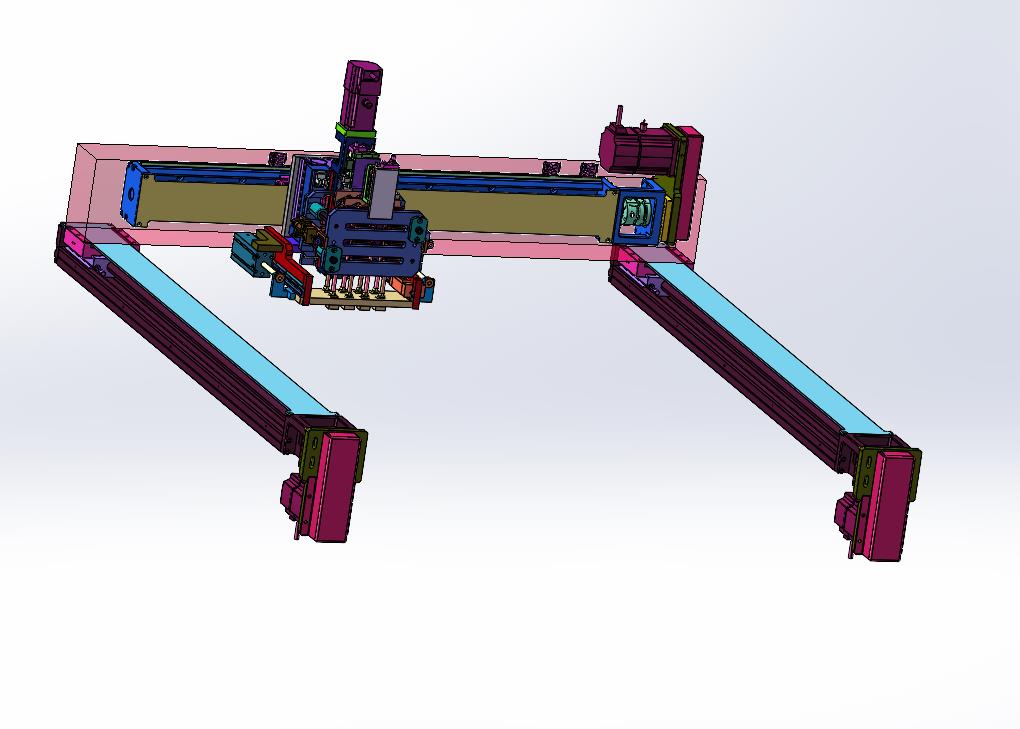
三軸坐標(biāo)系模組移動(dòng)變距吸盤抓手是一種精密的自動(dòng)化執(zhí)行機(jī)構(gòu),它能夠在三維空間內(nèi)精確移動(dòng)和操作物體。通過(guò)獨(dú)立控制三個(gè)軸(X、Y、Z軸)的位置,該模組能夠?qū)崿F(xiàn)精準(zhǔn)的定位和移動(dòng),同時(shí)變距吸盤抓手能夠根據(jù)不同物體的表面特性和尺寸進(jìn)行自適應(yīng)調(diào)節(jié),實(shí)現(xiàn)穩(wěn)定可靠的抓取和放置操作。
三軸坐標(biāo)系模組移動(dòng)變距吸盤抓手
-

無(wú)敵真皮皮
上傳于 2025-04-08
本模型來(lái)自于用戶自傳,版權(quán)屬于上傳用戶,如有異議,請(qǐng)舉報(bào)刪除!
-
- 喜歡 0
- 評(píng)論 0
- 瀏覽 23
- 下載 0
-
標(biāo)簽
-
該作者的其他作品
-
-
作品分享


平diy桌面級(jí)快速成型3D打印機(jī)")
地賽道成人兒童電動(dòng)卡丁車四輪沙灘車")
電機(jī)4軸高精度自動(dòng)化機(jī)械臂")


動(dòng)臺(tái)袋子印畫設(shè)備")



")
床")

全面罩")
擠出頭加熱鋁塊黃銅打印頭噴嘴")


