魔猴賬號(hào)登錄
- 短信快捷登錄
- 賬號(hào)密碼登錄
注冊(cè)賬戶(hù)下單得積分,享受會(huì)員專(zhuān)屬折扣,也可兌換豐富禮品
員體系")
費(fèi)")

魔猴賬號(hào)登錄

魔猴君 知識(shí)堂 470天前
雖然笛卡爾坐標(biāo)并不總是被使用,但每臺(tái)FDM 3D打印機(jī)都需要某種方法來(lái)描述空間中的位置,以便定位和確定噴嘴的位置。同時(shí),為了實(shí)現(xiàn)這一目標(biāo),不同類(lèi)型的機(jī)器使用不同的機(jī)械運(yùn)動(dòng)系統(tǒng)來(lái)操縱熱端和沉積融化的長(zhǎng)絲。逐層沉積過(guò)程高度依賴(lài)于軸的運(yùn)動(dòng),這對(duì)打印質(zhì)量和速度有直接影響。
通常情況下,橫向運(yùn)動(dòng)(即左、右、前、后)通常分配給X軸和Y軸,而Z軸則對(duì)應(yīng)于垂直運(yùn)動(dòng)。根據(jù)這一慣例,每一層都在XY平面內(nèi)沉積,而Z軸運(yùn)動(dòng)則負(fù)責(zé)利用3D切片機(jī)中預(yù)先設(shè)定的高度在層與層之間推進(jìn)。
在本文中,我們將介紹FDM3D打印運(yùn)動(dòng)的幾個(gè)方面,特別是與不同運(yùn)動(dòng)學(xué)系統(tǒng)和沿軸運(yùn)動(dòng)有關(guān)的方面。首先,我們將回顧不同類(lèi)型的3D打印機(jī)及其工作原理。
3D打印機(jī)的類(lèi)型
FDM3D成型機(jī)可以采用多種配置來(lái)實(shí)現(xiàn)噴嘴相對(duì)于構(gòu)建平臺(tái)的3D運(yùn)動(dòng)。然而,由于沒(méi)有官方的分類(lèi)系統(tǒng),在討論各種打印機(jī)樣式時(shí)可能會(huì)產(chǎn)生混淆。
一、直線(xiàn)型
直線(xiàn)型打印機(jī)是最常見(jiàn)的FDM打印機(jī),包括許多通用和特定的機(jī)器子類(lèi)型。"直線(xiàn)"指的是沿每個(gè)軸的運(yùn)動(dòng)(大部分)都是獨(dú)立的線(xiàn)性運(yùn)動(dòng),這通常會(huì)導(dǎo)致打印機(jī)設(shè)計(jì)成方形或盒形。
遺憾的是,直角打印機(jī)往往容易引起混淆。這是因?yàn)槎嗄陙?lái)出現(xiàn)了許多名稱(chēng)和標(biāo)簽,其中一些具有多重含義,另一些則含義重疊。例如,造成混淆的主要原因之一是"笛卡爾"一詞,它通常不是用來(lái)區(qū)分極坐標(biāo)打印機(jī),而是用來(lái)泛指直角坐標(biāo)打印機(jī),以代替更具體的子類(lèi)型名稱(chēng)(如XZ打印頭)。這可能會(huì)產(chǎn)生誤導(dǎo),因此最好避免將機(jī)器標(biāo)為"笛卡爾打印機(jī)",因?yàn)榻^大多數(shù)打印機(jī)都使用笛卡爾坐標(biāo)(包括不是直角坐標(biāo)的delta和SCARA打印機(jī))。
有鑒于此,以下三節(jié)將討論各種類(lèi)型的直角坐標(biāo)打印機(jī),首先討論一些通用類(lèi)型--XZ打印頭、XY打印頭和交叉式--然后再討論一些更具體的類(lèi)型--CoreXY、H-bot和皮帶式。
1、XZ頭、XY頭和交叉

Prusa打印機(jī)采用XZ頭運(yùn)動(dòng)系統(tǒng)(來(lái)源:Prusa Research)
大多數(shù)直線(xiàn)打印機(jī)都是XZ打印頭、XY打印頭或交叉式打印機(jī),這些標(biāo)簽指的是不同的龍門(mén)架配置。
這些打印機(jī)的移動(dòng)部件可能非常重,這意味著在高速運(yùn)轉(zhuǎn)時(shí)突然改變方向可能會(huì)造成問(wèn)題。這個(gè)問(wèn)題與打印機(jī)的抖動(dòng)設(shè)置有關(guān),可能導(dǎo)致沉積不準(zhǔn)確,甚至打印失敗。
盡管如此,這些3D打印機(jī)擁有最簡(jiǎn)單的運(yùn)動(dòng)系統(tǒng),通常用于DIY 3D打印機(jī)項(xiàng)目。請(qǐng)注意,懸臂式打印機(jī)(如Prusa Mini+和Ender 2 Pro)本質(zhì)上是框架不同的XZ頭打印機(jī)。
2、CoreXY&H-Bot

CoreXY打印機(jī)利用相當(dāng)復(fù)雜的同步帶組件進(jìn)行橫向移動(dòng)(來(lái)源:ReP_AL Maker Shop)
CoreXY 3D打印機(jī)使用一種相當(dāng)特殊的運(yùn)動(dòng)機(jī)制。其XY橫向運(yùn)動(dòng)由兩個(gè)電機(jī)和兩條長(zhǎng)定時(shí)皮帶驅(qū)動(dòng),是一個(gè)相當(dāng)復(fù)雜的動(dòng)態(tài)系統(tǒng)。垂直運(yùn)動(dòng)(Z軸)完全由構(gòu)建板向下執(zhí)行。
雖然這些3D打印機(jī)與其他打印機(jī)相比具有眾多優(yōu)勢(shì),但最重要的可能是它們能夠以更高的速度進(jìn)行打印。CoreXY型打印機(jī)的活動(dòng)部件更少、更輕,因此熱端移動(dòng)速度更快,打印速度也更快。這是因?yàn)樨?fù)責(zé)XY運(yùn)動(dòng)的電機(jī)是固定的,并連接到打印機(jī)的機(jī)架上,從而大大減少了振動(dòng)。
然而,過(guò)于依賴(lài)長(zhǎng)同步帶可能會(huì)造成問(wèn)題,因?yàn)楸仨毷冀K對(duì)齊和張緊同步帶。皮帶張力過(guò)低會(huì)導(dǎo)致運(yùn)動(dòng)不準(zhǔn)確,而皮帶張力過(guò)高則會(huì)增加磨損。劣質(zhì)皮帶也是此類(lèi)打印機(jī)出現(xiàn)問(wèn)題的主要原因。
H-bot3D打印成型機(jī)在風(fēng)格上非常相似,經(jīng)常與CoreXY混為一談,但它們?cè)谄У呐渲梅绞缴嫌兴煌oreXY使用兩條同步帶,而H-bot打印機(jī)只使用一條,因此在振動(dòng)和扭矩方面存在一些差異。由于這一條皮帶的張力非常重要,因此需要不斷調(diào)整。此外,皮帶的特定配置已被證明會(huì)在打印頭運(yùn)動(dòng)中產(chǎn)生非理想的拉鋸戰(zhàn)式扭曲。由于這些原因,H型機(jī)器人自問(wèn)世以來(lái),受歡迎程度有所下降。
3、帶式3D打印機(jī)

帶式3D打印機(jī)以傳送帶的形式展示“無(wú)限”Z軸(來(lái)源:Polar)
帶式3D打印機(jī)是FDM 3D打印領(lǐng)域最近出現(xiàn)的一種非常獨(dú)特的新技術(shù)。皮帶"指的是構(gòu)建平臺(tái)是一條傳送帶。這可能是這些機(jī)器的主要賣(mài)點(diǎn),因?yàn)樗试S用戶(hù)創(chuàng)建很長(zhǎng)的部件或重復(fù)生產(chǎn)部件,而無(wú)需停止打印機(jī)(理論上)。
在大多數(shù)情況下,帶式3D打印機(jī)都是CoreXY或XY頭打印機(jī),其機(jī)架相對(duì)于(帶式)構(gòu)建平臺(tái)是傾斜的,這意味著坐標(biāo)系實(shí)際上是傾斜的。因此,帶式打印機(jī)被稱(chēng)為"無(wú)限"Z軸。這樣做的后果是降低了整體打印速度,并且打印可能需要額外的支撐結(jié)構(gòu)(如上圖中紅色的3D Benchys)。
由于缺乏打印床加熱功能,這些打印機(jī)在使用材料方面也受到限制;ABS等材料可能會(huì)出現(xiàn)嚴(yán)重的打印床附著問(wèn)題。
4、三角洲3D打印機(jī)
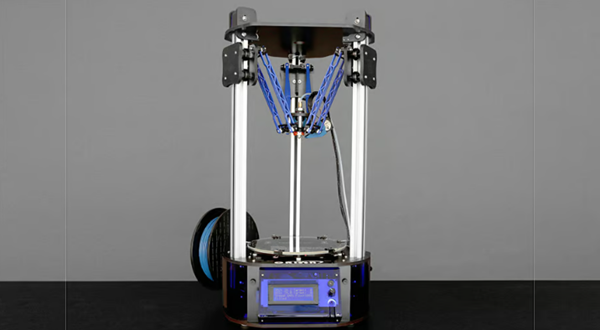
與直線(xiàn)打印機(jī)相比,Delta打印機(jī)的運(yùn)動(dòng)學(xué)并不直觀(guān)(來(lái)源:Adafruit)
從直線(xiàn)型打印機(jī)發(fā)展而來(lái)的三角洲3D打印機(jī)采用了一種相當(dāng)獨(dú)特的運(yùn)動(dòng)機(jī)制,在業(yè)內(nèi)被稱(chēng)為"三角洲機(jī)器人"。這些機(jī)器的熱端連接到三個(gè)移動(dòng)臂上,每個(gè)移動(dòng)臂都連接到自己的垂直導(dǎo)軌上。由于所有熱端運(yùn)動(dòng)都是由所有三個(gè)臂同時(shí)執(zhí)行的,因此沒(méi)有任何一個(gè)臂與任何單獨(dú)的軸相對(duì)應(yīng)。
雖然三角式打印機(jī)仍被視為笛卡爾式打印機(jī),但其運(yùn)動(dòng)學(xué)原理與直角式打印機(jī)相比并不直觀(guān)。三角式打印機(jī)的運(yùn)動(dòng)特性使其可以進(jìn)行非常快速和精確的操作,因?yàn)榇蛴☆^比直線(xiàn)式機(jī)器要輕得多。這減少了噴頭運(yùn)動(dòng)的慣性,使運(yùn)動(dòng)速度更快,振動(dòng)更小。
Delta打印機(jī)具有完全固定的圓形構(gòu)建板,在打印圓形模型時(shí)效果很好。此外,其獨(dú)特的設(shè)計(jì)有利于提高高度,通常用于打印較高的物體。同時(shí),較小的XY尺寸也會(huì)造成限制。由于其復(fù)雜性較高,校準(zhǔn)和故障排除也較為困難。
5、SCARA 3D打印機(jī)
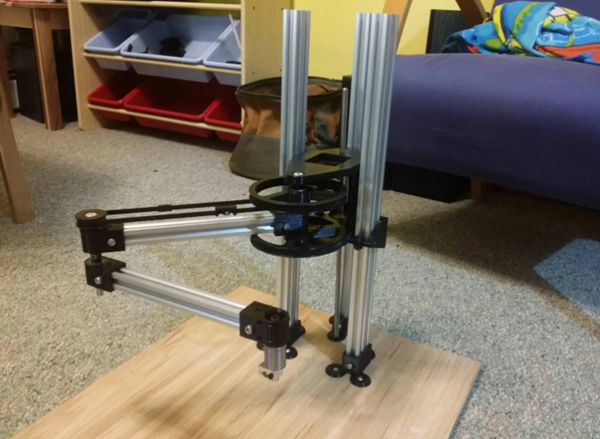
SCARA工作正在進(jìn)行中(來(lái)源:k0all,來(lái)自Reddit)
SCARA是"選擇性順應(yīng)鉸接機(jī)械臂"的縮寫(xiě)。顧名思義,它使用機(jī)械臂執(zhí)行XY運(yùn)動(dòng),而垂直(Z軸)運(yùn)動(dòng)通常完全由構(gòu)建板完成。
兩個(gè)機(jī)械臂均由兩個(gè)單獨(dú)的電機(jī)驅(qū)動(dòng),它們的耦合運(yùn)動(dòng)可實(shí)現(xiàn)熱端在XY平面內(nèi)的定位。適當(dāng)?shù)臋C(jī)械聯(lián)動(dòng)系統(tǒng)可使耦合機(jī)械臂到達(dá)整個(gè)構(gòu)建臺(tái)。Z運(yùn)動(dòng)通常由單個(gè)步進(jìn)電機(jī)完成。
這些打印機(jī)速度很快,但需要高質(zhì)量的活動(dòng)關(guān)節(jié)才能正常工作。由于其獨(dú)特的配置,SCARA3D成型機(jī)占用的空間也比直線(xiàn)型機(jī)器小。
不過(guò),SCARA可能是市場(chǎng)上最罕見(jiàn)的3D打印機(jī)配置。這意味著要找到備用和升級(jí)部件以及適當(dāng)?shù)纳鐓^(qū)支持可能非常困難。
二、直線(xiàn)運(yùn)動(dòng)系統(tǒng)
現(xiàn)在我們知道,無(wú)論打印機(jī)的類(lèi)型如何,線(xiàn)性運(yùn)動(dòng)系統(tǒng)都是3D打印機(jī)最關(guān)鍵的機(jī)構(gòu)之一。雖然熱端是在3D空間內(nèi)移動(dòng)的,但所有運(yùn)動(dòng)都可以分解為沿三個(gè)軸的線(xiàn)性運(yùn)動(dòng)。
在3D打印機(jī)中,驅(qū)動(dòng)這種線(xiàn)性運(yùn)動(dòng)的最常見(jiàn)方式是使用電機(jī)。這些電機(jī)首先將電能轉(zhuǎn)化為旋轉(zhuǎn)運(yùn)動(dòng),然后使用各種機(jī)構(gòu)將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為線(xiàn)性運(yùn)動(dòng)。現(xiàn)在讓我們來(lái)看看三個(gè)關(guān)鍵機(jī)構(gòu)及其組件,以便更好地了解3D打印機(jī)軸所涉及的線(xiàn)性運(yùn)動(dòng)。
1、步進(jìn)電機(jī)

步進(jìn)電機(jī)按標(biāo)準(zhǔn)尺寸分類(lèi),表明其面板直徑(來(lái)源:Mikroe)
步進(jìn)電機(jī)是迄今為止3D打印領(lǐng)域使用最多的驅(qū)動(dòng)電機(jī)。這些無(wú)刷交流電機(jī)以增量(步)為單位旋轉(zhuǎn),即使沒(méi)有位置傳感器反饋,也能精確控制其旋轉(zhuǎn)。由于步進(jìn)電機(jī)不是非常復(fù)雜的機(jī)械裝置,因此價(jià)格相對(duì)便宜。
步進(jìn)電機(jī)根據(jù)其規(guī)格進(jìn)行識(shí)別,其術(shù)語(yǔ)由美國(guó)國(guó)家電氣制造商協(xié)會(huì)(NEMA)標(biāo)準(zhǔn)化。最常用于3D打印的電機(jī)都以該美國(guó)協(xié)會(huì)的名稱(chēng)命名,通常稱(chēng)為"NEMA",后面的數(shù)字表示其面板的尺寸。例如,常用的NEMA 17的面板直徑為1.7英寸(約43.18毫米)。
對(duì)于3D打印來(lái)說(shuō),步進(jìn)電機(jī)的標(biāo)準(zhǔn)扭矩范圍為40至45牛米,這已經(jīng)足夠。這些電機(jī)提供了扭矩和速度之間的折衷方案,使其既適用于大多數(shù)直線(xiàn)型打印機(jī)等較重的設(shè)置,也適用于打印速度較快的CoreXY型打印機(jī)。
2、絲杠
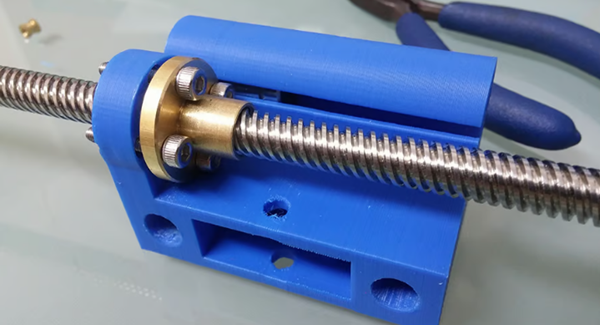
導(dǎo)螺桿是另一種重要的機(jī)械裝置,它是一種專(zhuān)門(mén)用于將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為線(xiàn)性運(yùn)動(dòng)的機(jī)械部件。雖然有不同種類(lèi)的導(dǎo)螺桿,但最常見(jiàn)的是梯形(ACME)導(dǎo)螺桿。
這些導(dǎo)桿通過(guò)彈性聯(lián)軸器與步進(jìn)電機(jī)相連,允許軸的末端有一定的移動(dòng)量,從而避免軸承和電機(jī)本身的應(yīng)力和磨損。這種設(shè)置通常用于3D打印機(jī)沿Z軸的垂直運(yùn)動(dòng)。
使用導(dǎo)螺桿進(jìn)行線(xiàn)性運(yùn)動(dòng)的最大優(yōu)勢(shì)可能是其強(qiáng)大的推力和自鎖能力,這意味著如果打印機(jī)意外斷電,它們(通常)不會(huì)移動(dòng)。這也是它們常用于移動(dòng)構(gòu)建平臺(tái)的原因之一。不過(guò),X軸或Y軸很少使用導(dǎo)螺桿,主要是因?yàn)樗鼈內(nèi)菀桩a(chǎn)生嚴(yán)重的反向間隙,導(dǎo)致位置不精確,而且速度很慢。
3、正時(shí)皮帶

皮帶輪組件主要用于3D打印機(jī)中的X軸和Y軸運(yùn)動(dòng)(來(lái)源:All3DP)
同步帶是一種"齒形"橡膠帶,在兩個(gè)部件(通常是電機(jī)和皮帶輪)之間傳遞旋轉(zhuǎn)運(yùn)動(dòng)。一旦皮帶上安裝了滑塊,就可以實(shí)現(xiàn)線(xiàn)性運(yùn)動(dòng),而電機(jī)則負(fù)責(zé)驅(qū)動(dòng)整個(gè)皮帶-滑輪組件。
這些皮帶根據(jù)其齒形進(jìn)行識(shí)別。3D打印常用的同步帶使用"Poly Chain GT2"齒形,通常簡(jiǎn)稱(chēng)為"GT2"。電機(jī)皮帶輪必須具有與同步帶相同的齒形,裝配耦合才能正常工作。
在FDM打印機(jī)中,該系統(tǒng)通常用于為X軸和Y軸提供運(yùn)動(dòng),因此皮帶的正確張緊至關(guān)重要。這就是為什么許多3D打印機(jī)都內(nèi)置了調(diào)節(jié)皮帶張力的裝置。
編譯整理:ALL3DP


全國(guó)咨詢(xún)熱線(xiàn) 010-53652212(工作日) | 152 0110 5575、152 1011 0562(周末) 





















3D模型是否是實(shí)體模型?")

3D打印材料屬性一覽表")
3D打印用模型文件?")
合作")
精華文章合集,你想知道的3D打印知識(shí)都在這里!")
保護(hù)聲明")

數(shù)據(jù)格式")
脂(SLA)")

外3D打印用金屬粉末有哪些?")
