科學家使用3D打印技術開發低成本的“象鼻”機器人
魔猴君 行業資訊 1444天前
來自蒂賓根大學和格拉茨科技大學的一組研究人員用3D打印了能夠模仿大象象鼻運動的機械臂。FDM打印的機器人在尖端配備了抓爪,可以使用機器學習技術來漫游并適應新任務,例如撿起大理石并將它們放在講臺上。作為一種低成本的概念驗證開發,該設計最終可以繼續用于工業生產線上,在工業生產線上它可以執行各種靈活的操作,例如運輸汽車零件或組裝電子設備。
該研究的合著者塞巴斯蒂安·奧特(Sebastian Otte)博士對《新科學家》說:“我們的夢想是,我們可以在持續學習的環境中做到這一點,在這種學習環境中,機器人會在沒有任何知識的情況下啟動,然后嘗試達到目標這樣就產生了自己的學習示例。”
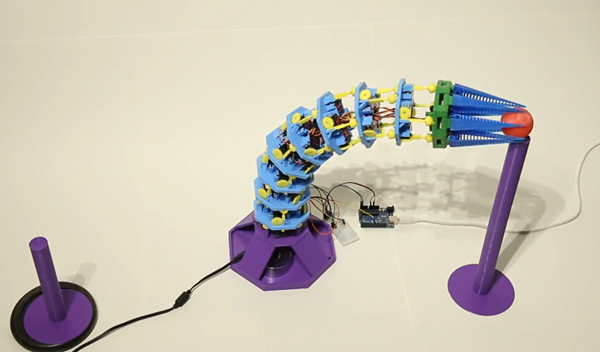
機器人學習如何撿起和放置大理石。圖片來自蒂賓根大學。
工業5.0:象鼻
象鼻是進化史上最好的作品之一。它們具有相等的部分,既靈活又結實,并為大象提供了在動物界不常見的靈巧程度。因此,它們是學術界許多現代仿生項目的靈感來源,氣動執行器通常充當人造肌肉纖維以實現彎曲和伸展。
Otte和他的同事選擇了模塊化設計,該設計基于一組統一的,可堆疊的關節模塊,每個模塊具有三個自由度(DoF)。當前的設計最多具有這些模塊中的十個,但是據報道,使用功能更強大的電機可以使機器人的長度增加一倍。每個部分都裝有幾個電動機驅動齒輪,這些電動機可同時使模塊在兩個軸上傾斜多達40°。除了彎曲之外,機器人的軀干還能夠加長和縮短–就像真實的東西一樣。不幸的是,計算機器人執行器執行復雜操作的逆運動學并不是一件容易的事,對于這么多的自由度來說更是如此。這就是人工智能的用武之地。
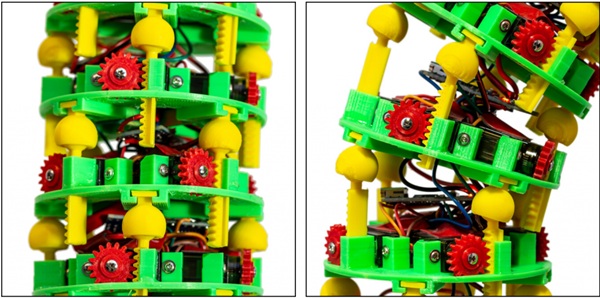
機械臂的可堆疊關節。圖片來自蒂賓根大學。
刺激神經網絡進行導航
該團隊使用所謂的尖刺神經網絡(SNN)來控制機器人,這是一種緊密模仿自然大腦過程的人工神經網絡。除了合并神經元和突觸狀態外,SNN在模型中還包括了時間概念。通過觀察一組訓練運動,SNN能夠將電機運動映射到相應的機器人姿態,從而使團隊能夠“展開”模型,以近毫米的精度進行目標驅動的導航。研究人員寫道:“我們不僅證明可以用基本的3D打印設備構造低成本的類似軀干的機械臂,而且還展示了如何使用最新的循環峰值神經網絡體系結構來控制它們。”
就未來的研究而言,該團隊已經表示有可能將基于雷達的距離傳感器并入以實現防撞功能,從而使該設備能夠與人類協同工作。另一種方法是將工作轉變成類似蛇的機器人,而不是固定的手臂,從而可以“四處尋找”進行搜索和營救行動。

機器人處于完全屈曲狀態。圖片來自蒂賓根大學。
低成本機器人技術是如何將3D打印應用于解決抽象問題的主要示例。東京明治大學的一組研究人員最近定制了FDM 3D打印機,以制造出低成本的“多合一”制造機器人。 Functgraph能夠自動打印并連接自定義工具頭,以更改其活動功能,使用戶能夠抓取,旋轉和破壞3D打印對象,從而在單個打印作業中組裝復雜的機械系統。
在其他地方,中國天津大學的科學家此前已經3D打印了可自定義的機器人,該機器人能夠實時縮放和監視工業設施中的管道。單件式設備具有一系列軟彎曲機制和模塊化抓手,使其能夠靈活地爬升奇形怪狀的基礎設施。
來源:https://www.3ddayin.net/3Ddayinfangan/40240.html









")