TU DELFT工程師開發具有自我感知的3D打印軟機器人
魔猴君 行業資訊 2069天前
據魔猴網了解,來自荷蘭代爾夫特理工大學(TU Delft)的研究人員創造了多色3D打印傳感器,讓軟機器人具有自我意識和適應性。正如該研究的第一作者Rob Scharff所述,軟機器人可以同時彎曲,拉伸和扭曲,使現有的傳感器不合適。通過靈活的嵌入式3D打印傳感方法,可以檢測到各種各樣的變形,增加機器人與物體之間的相互作用。“這些是與人類或易碎物體密切相互作用的機器人的重要特征,例如護理機器人或處理各種尺寸的水果和蔬菜的夾子。“Scharff評論道。 “由于這里發生的相互作用非常難以預測,機器人需要能夠感知到自己手指和身體的位置。”
3D打印軟機器人
柔軟的機器人由高度靈活的材料制成,能夠進行類似于生物的自然運動。目前,NASA正在使用3D打印硅膠模具的致動器來構建專為太空探索而設計的軟機器人。其他應用也在醫學和動物學方面進行了研究。TU Delft研究人員實施了Stratasys PolyJet 3D打印和Agilus Black,VeroCyan和VeroMagenta材料,以創建彎曲執行器,在頂部保持具有可擴展波紋管形狀的空氣。根據Scharff的說法,“給氣室充氣會使頂部的波紋管膨脹,而底部保持相同的長度,產生彎曲運動。”
為了增加“感應”能力,Scharff補充道,“我們在這些頂部波紋管內打印彩色圖案,并在執行器的不可伸展的底部用顏色傳感器觀察這些顏色模式,當執行器充氣時,從傳感器開始出現的顏色會逐漸消失。我們使用這種顏色的變化和強度的變化來預測執行者的形狀。“
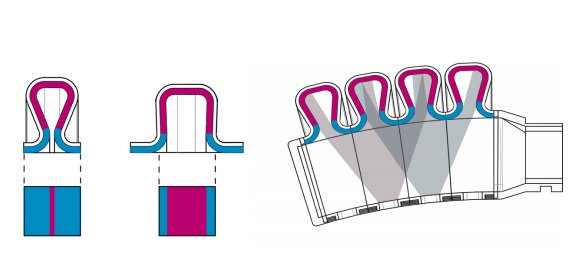
致動器和顏色傳感器。圖片來自TU Delft。
堅固的抓手
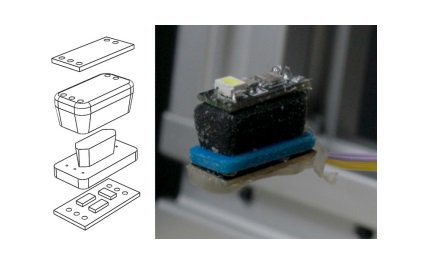
傳感器使用前饋神經網絡(FNN)進行操作。在FNN內收集的1000個傳感器值樣本與致動器形狀相對應。致動器形狀由不可伸展層上的六個標記表示,這些標記由相機跟蹤。網絡的輸入是4個顏色傳感器的讀數,有4個通道(紅色,綠色,藍色,白色)。“我們的方法能夠預測每個標記的位置,誤差通常在0.025和0.075mm之間。“Scharff補充道。“與軟機器人中的現有傳感器不同,我們能夠測量夾具在物體周圍彎曲的確切形狀。因此,這項工作是朝著能夠用軟機器人準確移動和抓取物體邁出的一大步。“
來源:中國3D打印網









")